Spring 2024 Design Day
Our Spring 2024 Engineering Design Day event will be held on Wednesday, May 1, 2024, from 1:00pm-4:00pm in Viejas Arena. Learn more about where to park here.
Design Day is the largest College of Engineering event and it showcases the exciting and innovative design projects that our undergraduate Engineering students conceive, design and build during the academic year. Each Senior Design classes in Aerospace Engineering, Civil, Construction & Environmental Engineering, Electrical & Computer Engineering, and Mechanical Engineering will be participating. Over 80 projects will be showcased at the 2024 Engineering Design Day event. Below are the Mechanical Engineering Senior Design projects that will be showcased at the event (More details of individual projects will be available as the event draws closer).
Design Day Projects
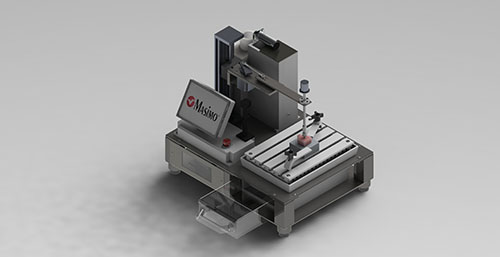
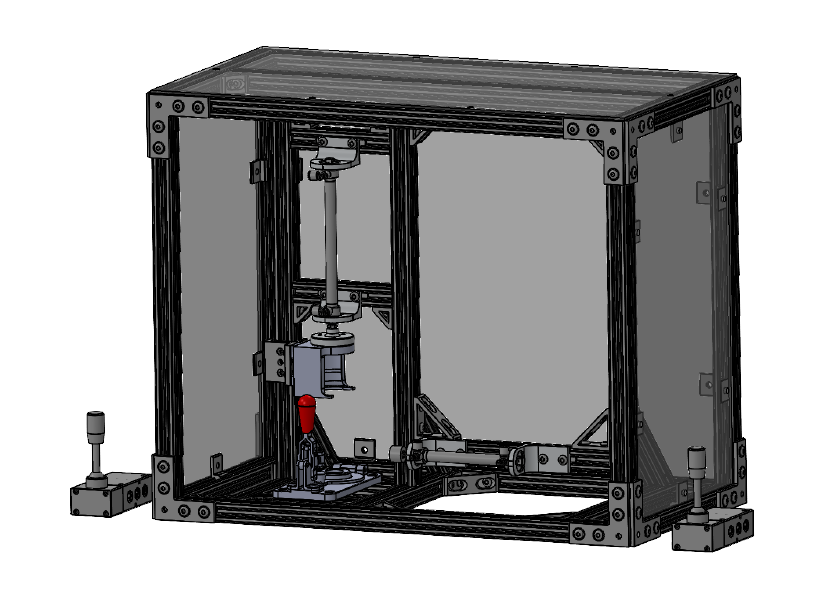
This project, sponsored by Masimo, aimed to create a standardized testing system for chemical resistance on medical monitoring products. It employs a fluid delivery mechanism for cleaning agents followed by wipes under constant pressure. Controlled through a touch-screen panel, it regulates parameters such as speed and cycles, equipped with a camera for progress monitoring and memory for test recall. The user can adjust parameters like wipes, cycle intervals, fluid volume, and duration.
- Team Members: Seba Alkandari, Abraham Arana, Jeanette Arratia, Aaron Ayala, James Burton, Cesar Casas, Allen Juliano, Donald Luu, Samuel Martinez, Jason Ramirez
- Team M.A.C.W.E.R.P. Video
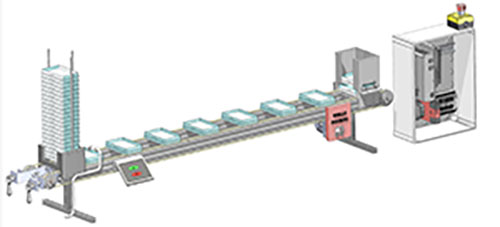
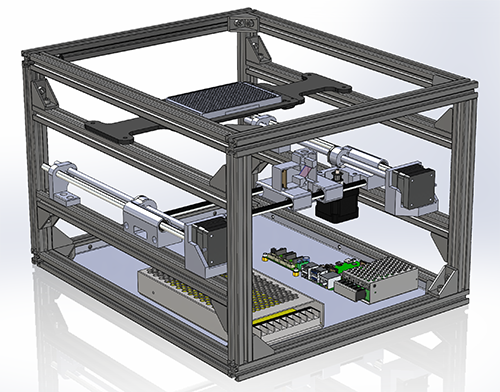
In support of Cibus US LLC, an agricultural trait development company, Team Wells Pourgo worked to automate the filling of one-well Petri dishes with plant culture medium. Custom mechanisms were designed and tested to carefully relay the plates through the process. The system can de-stack, fill, and cool the plates before restacking them for packaging. Full autonomy is achieved using object sensors to trigger events and stepper motors for actuation. A safety controller monitors e-stop buttons and manages power to the motors.
- Team Members: Rhold Angelo Flauta, Derek Crowley, Troy Robinson, Kazem Shawwa
- Team Wells Pourgo Video
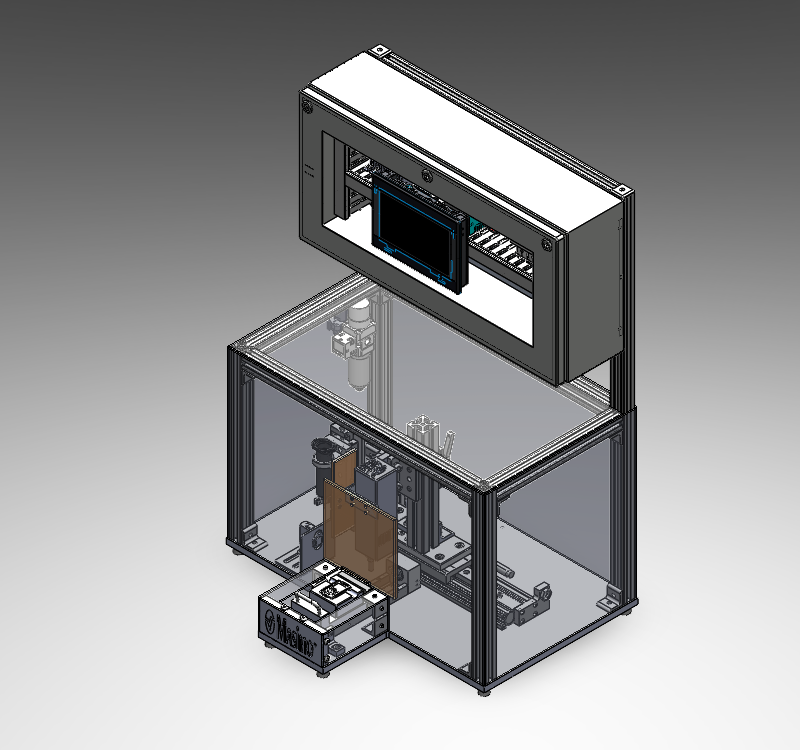
Masimo’s health-care products require light pipes to provide a path for light to travel from the inside to the outside of a device. Current assembly of these light pipes require production-grade manufacturing equipment for large scale operations. Team Photron was tasked to create a lightweight and cheaper solution for small scale operations. Using positioning tables along with a combination of pneumatic and manual guide rails, this device will be capable of producing light tubes with a repeatability of 0.005”.
- Team Members: Ethan Anderson, Wade Anderson, Steven Awakem, Brandon Cabatu, Mason Cayaban,
Kyle Desamito, Vidal Marquez, Marco Montano, Trent Nguyen, Zachary Payne - Team Photron Video
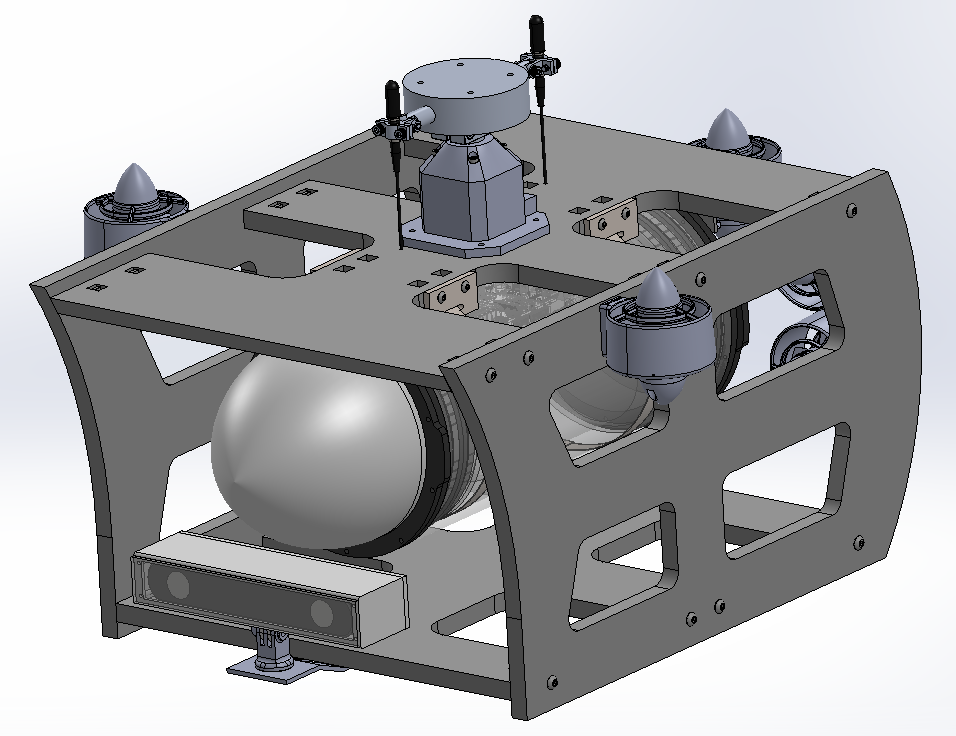
AUV Pathfinders was tasked with designing and manufacturing a fully autonomous underwater vehicle (AUV). This AUV is to have a rotating hydrophone array. The hydrophone array will allow the user to capture acoustic data of marine environments.
- Team Members: Arenzana Tristan, Brillantes Richard, Ludkevicz Brenden, Sanabria Gonzalez Alan, Sanchez Steven, Waltermire Luke
- Team AUV Pathfinders
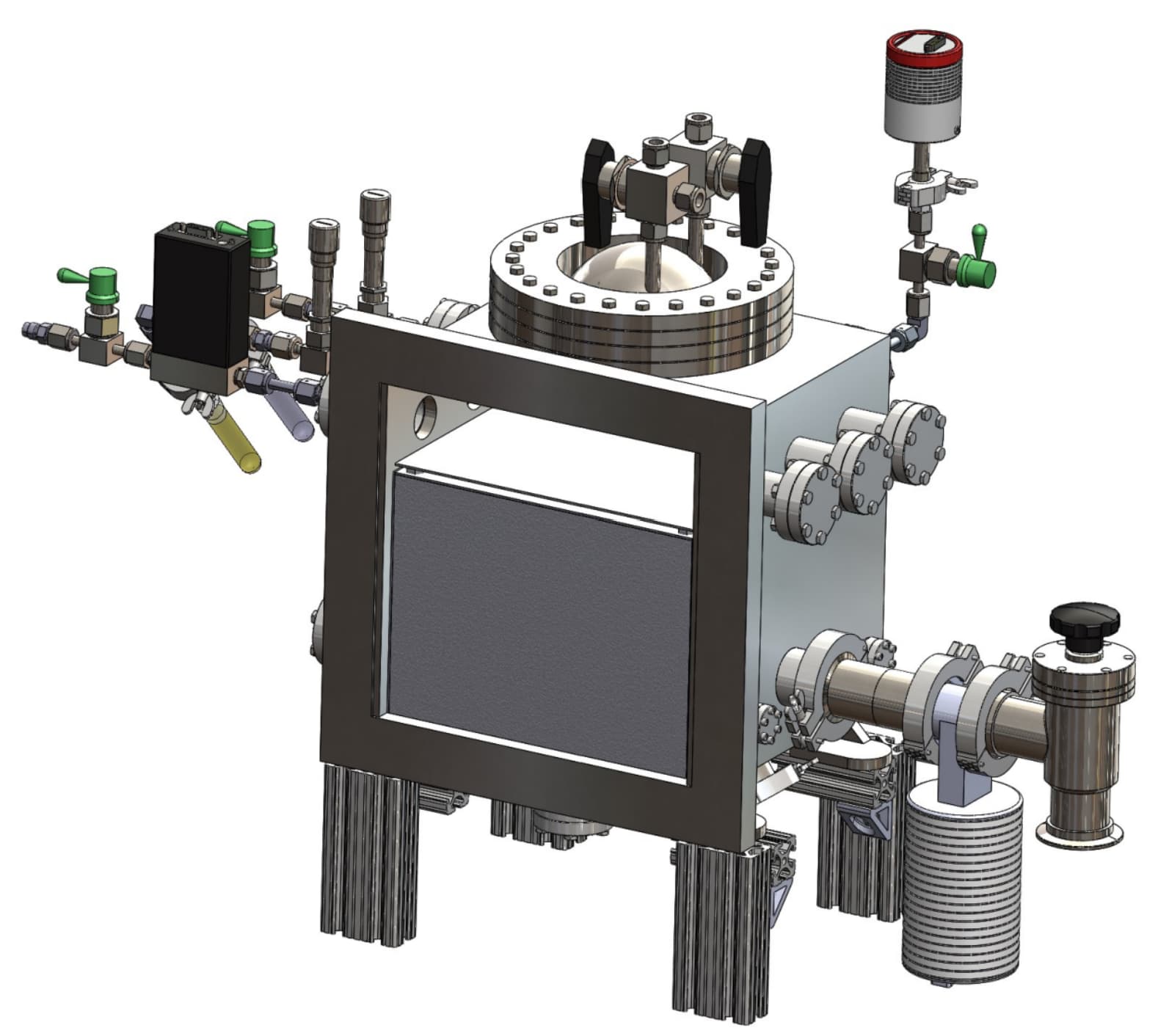
Team No Pressure was supplied by AMED Labs with a homebuilt out-of-service reactor to be used in the process of Chemical Vapor Deposition (CVD). Using the reactor’s existing design as a baseline, the team has retrofitted the reactor with functioning subsystems, and modified the reactor chamber to allow for a more efficient reaction process, with less precursor waste. The response time of the pressure transducer and thermocouples were optimized to give more accurate control over the reactor’s subsystems.
- Team Members: Devin Seyfarth, Norman Stone, Ahmad Taleb, PJ Thomas
- Team No Pressure Video
This project involved designing, manufacturing, and integrating an Unmanned Aerial System (UAS) for the California Unmanned Aerial Systems Competition. The UAS is designed for autonomous flight, waypoint navigation, object detection/classification/localization, and delivery of an undamaged payload at a marked target.
- Team Members: Lana Ayyash, Ryan DaWood, Patrick Moore, Hector Olmos-Pantoja, Kaia Ralston, Madison Rogers, Suhail Saqan, Saif Shinkar, Sean Wolf
- Team Dronely Raven Video
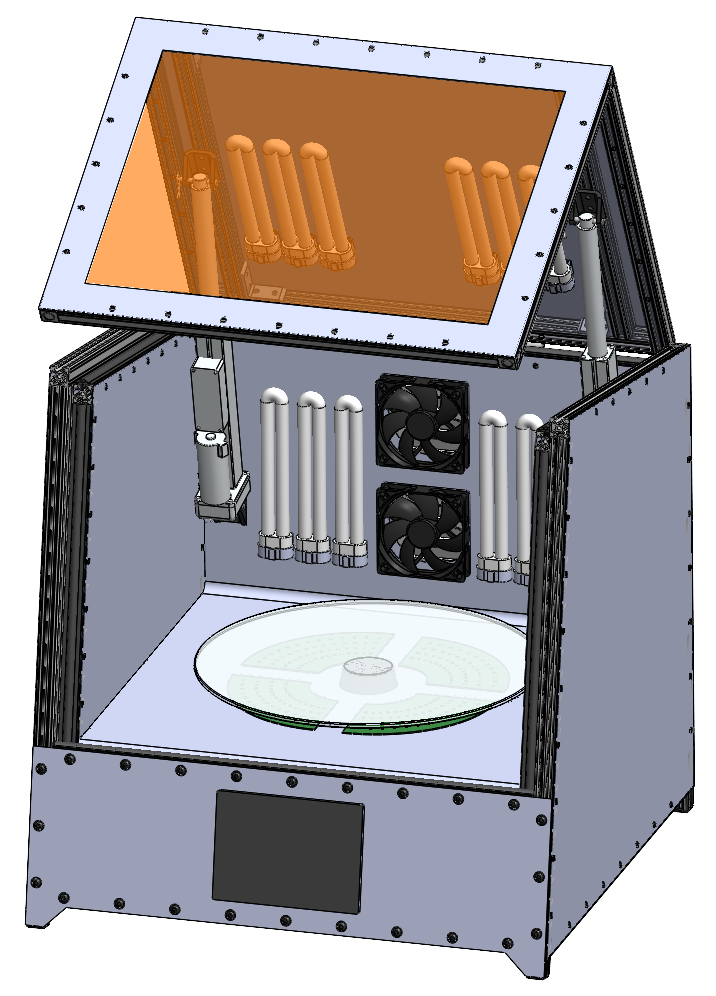
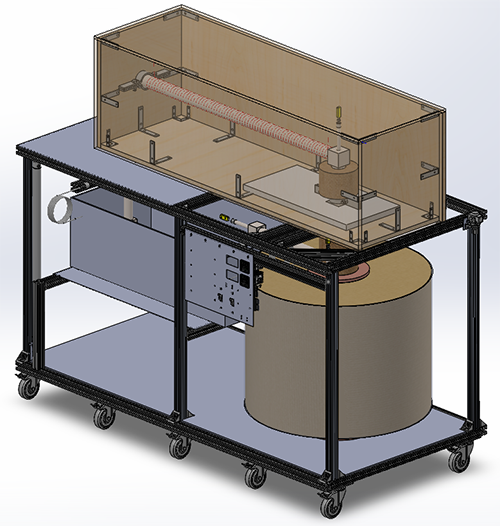
SDSU WaveCure has partnered with Masimo to design, document and fabricate a UV Curing Chamber for 3D printed parts. With a climate control system, hands-free access and hybrid UV-CFL, UV-LED technology, the UV curing chamber will operate for a set and controlled duration as inputted by the user on the touchscreen interface. The chamber features a rotating turntable for controlled uniform UV exposure to enhance a post-print UV curing process to stabilize material properties of parts printed using DLP, SLA, and MSLA.
- Team Members: Talal Alkhashti, Willie Arroyo Alva, Benjamin Daluz, Maxwell Lee, Esmeralda Marquez,
Ryan McKnight, Amber O’Brien, Ethan Taylor - Team SDSU WaveCure
{kind=link}
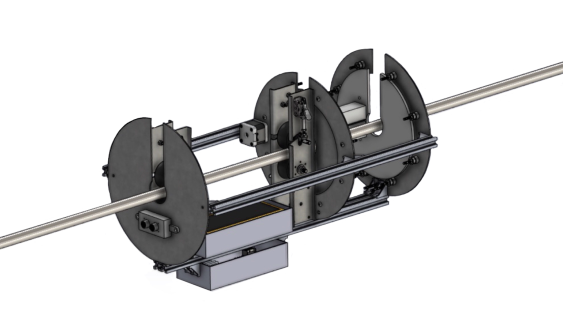
The Composite WiRE Wrap Robotic System addresses the critical need to enhance the efficiency of power transmission by mitigating the issue of power line sag. This project stands to revolutionize repair methods, potentially saving millions in replacement costs and reducing wildfire risks. We have developed a user-friendly, autonomous robotic system to wrap a composite material, resin-coated carbon fiber fabric, around existing lines, strengthening infrastructure and decreasing power losses.
- Team Members: Jonathan Arabo, Andrew Deguzman, Brad Leroy DelaLlana, Tuong Do, Audrey Meador, Victor Reyes,
Richard Rosengren, Brendon Swierczewski, Mario Velez - Team Wrap Tech Video
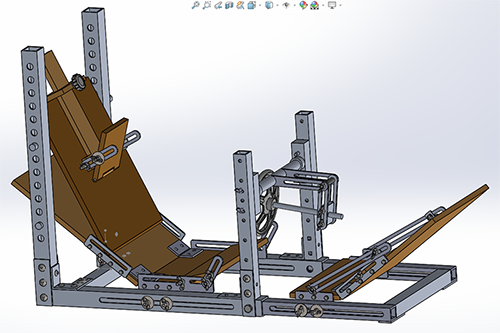
This project aims to develop a specialized test fixture for the Dexcom G7 Continuous Glucose Monitor Applicator. Designed to enhance operator consistency and reduce fatigue, the fixture will refine how the device is held, aligned, compressed, and deployed. By ensuring precise deployment of the G7 applicator, it will enable more accurate analysis of glucose level readings, guaranteeing reliable data collection and interpretation for optimized product performance and user experience.
- Team Members: Kevin Degeatano, Marco Gutierrez, Dylan Kuta, Selena Nguyen
- Team Dex-Tecs Video
{kind=link}
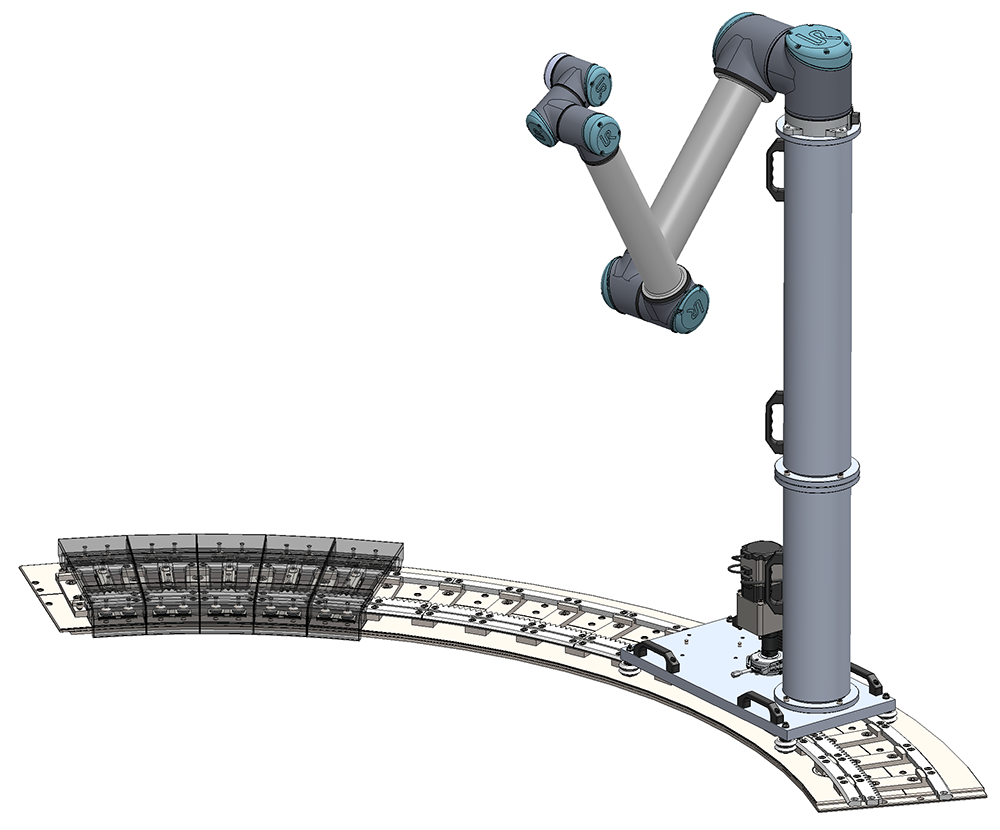
DIII-D National Fusion Facility, operated by General Atomics, is pioneering the science and innovative technology that will enable the development of nuclear fusion as an energy source for the next generation. A 6-axis robotic arm nicknamed ROSIE is currently used in the DIII-D program to weld studs and take measurements inside the vacuum vessel. This project aims to extend ROSIE’s capabilities by adding a circular rail and powered cart system, and integrating the cart into ROSIE’s control system as a 7th axis.
- Team Members: Kai Hespeler, Gabriel Lang, David Mauzey, Michael Perez, Hien Phan, Abraham Shalash, Maria Shamoon, Alec Stobbs, Joseph Tipane
- Team Ring Around the R.O.S.I.E. Video
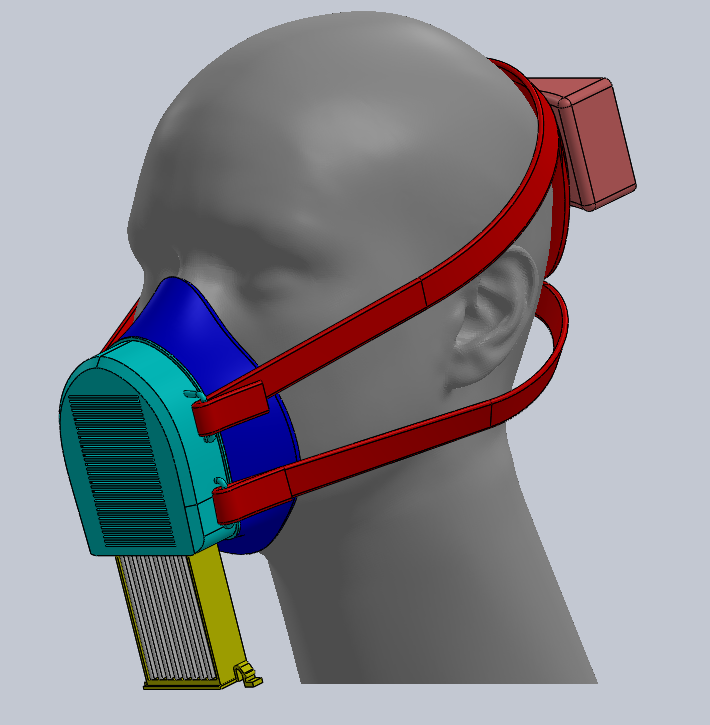
The Elastomeric Half Mask Respirator (EHMR), sponsored by Hiro PPE, seeks to provide a more breathable protective mask for individuals in polluted environments and healthcare professionals. The EHMR incorporates a filter made of pleated electrospun nanofibers, supplied by Hoff Engineering, and integrates gas sensors to provide information on air quality. Designed to accommodate five different CDC/ NIOSH 3D-scanned head shapes, the EHMR utilizes silicone molding to enhance user comfort and facial fit.
- Team Members: Fawaz Hakim, Tyler Jacobs, Jessica Munoz, Katie Naretto
- MediMask Design Team
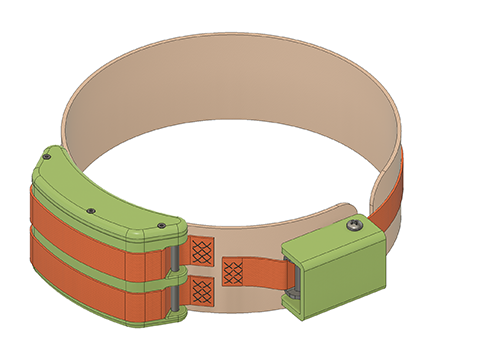
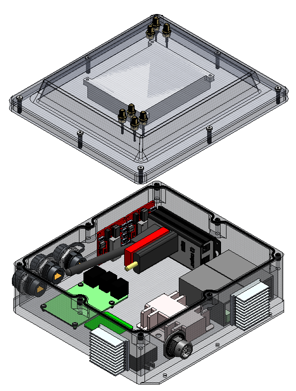
The San Diego Zoo Wildlife Alliance has partnered with Trunk Tech to create an anklet for African elephants to record their movement and behavior patterns. The device uses LoraWAN technology to transmit data logging status and contains an accelerometer for data collection. The tamper-proof enclosure is capable of withstanding elemental factors present in desert conditions and is water and high-impact resistant. The sponsor aims to use this technology to protect wild elephant populations at their partner site in Kenya.
- Team Members: Courtney Chase, Alexander Cherry, Jacob Flaxman, Rachel Gerrard, Ryan Kiok, Connor Martorana, Roberto Montano Bermudez, Eduardo Tovar, Anthony Vasquez
Aztec Electric Racing is in need of an ergonomics jig to help with the predesigned testing for their race car. They would like to have the ergonomics jig be easy to store in a locker in their workshop. AER should be able to manipulate the position of these components in order to get a good idea of the cockpit layout. The jig needs to be reusable and easy to store.
- Team Members: Andrew Boskovich, Bernice Gudino, Mehraj Khawaja, Cameron Senner
Booz Allen’s Fixed Power Payload Input Output (FP PLIO) system serves as a universal translator for third-party sensors. Specifically, the FP PLIO is applied on Booz Allen’s unmanned surface vehicle (USV), the Man-Portable Tactical Autonomous System (MANTAS). On the MANTAS, the FP PLIO controls all of the additional systems including sensors, cameras, and other components. It enables the ability to deliver key information to critical military personnel while increasing the safety of personnel as the vehicle is unmanned.
- Team Members: Tanner Hurst, Samuel Kneale, Kieran Looney, Samuel Lucas, Andy Lucio, Arely Nieblas, Alejandro Soto, Riley Stewart, Justin Taing
- Team FPP Force Video
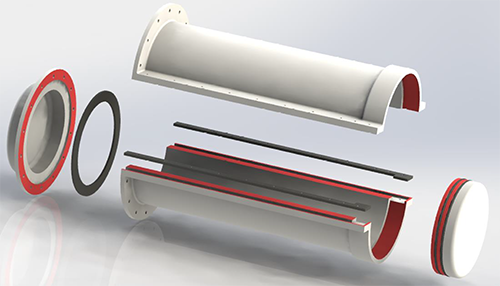
Solar Turbines produces turbine packages consisting of a turbine engine, driven equipment and a coupling assembly. The coupling covers prevent outside contact with the rotating driveshaft and seal in lubricating oil. The current coupling cover design is prone to leakages which can result in unwanted package shutdowns and
fires. Team Titan Seals engineered a new coupling cover design that seals existing leak paths while decreasing cost and weight by using composite materials and specialized gaskets.
- Team Members: Shane Arana, Alan Beal, Ignas Kasulaitis, Edward Muollo
- Team Titan Seals Video

Team ARES (Aztec Regolith Environment Sculptor) is representing San Diego State University in the NASA Lunabotics 2024 Competition. The team is tasked with the design and build of a telerobotic rover capable of traversing, excavating, transporting,
and depositing lunar regolith. This supports NASA’s Artemis missions, in which they plan to use in-situ resources for lunar construction. The team will travel to Kennedy Space Center to compete in a simulated deployment mission against other national universities.
- Team Members: Montserrat Castel, Hannah Hong, Christian Monroy, Patricia Munn, Sara Pirasteh, Stuart Pollmann, Jack Riffle, Scott Shoupe, Jack Volponi, Andrew Vu
- Team ARES Video
The US Department of Energy is invested in supercritical CO2-based thermodynamic cycles, often paired with solar heat. Consequently, implementing a storage system is crucial for the off-peak operation of such a cycle. The SDSU Combustion and Solar Energy Lab possesses substantial numerical modeling of the high-temperature, latent storage using molten aluminum silicide. However, experimental validation is pending. This system is vital for verifying calculations and material suitability in challenging conditions.
- Team Members: Jorge Balvaneda, Aden Hussein, Jason Nguyen, Brandon Wells
- Team Thermaphase (M.A.T.E.S.S.) Video

Team AVIAN Engineering delivers a wing fold system for General Atomics “MQ-9
Mojave” Remotely Piloted Aircraft (RPA). The goal of the project is to reduce the aircraft’s wingspan, allowing for increased stowage capability in aircraft carriers and hangars. The design incorporates a hinge with a unique axis of rotation while maintaining the structural integrity for flight. Additionally, a locking mechanism secures the wing for flight and incorporates an indication flag to notify the ground crew in an unlocked position.
- Team Members: Alexander Bautista, Grant Butsko, Tallon Mcdonough, Andres Mendoza
- Team AVIAN Video
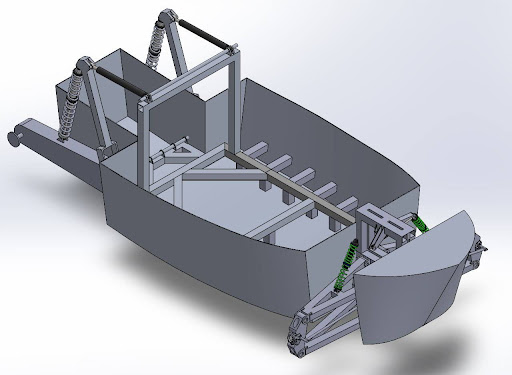
The Multi-Domain Vehicle is an amphibious vehicle that will operate in sea, surf, and land with an advanced three position extendable suspension and propulsion system to successfully navigate the transition between sea and land. The electrically powered scaled vehicle design will accommodate for traction, enable water propulsion, and provide a transition between land and sea tactical operations.
- Team Members: Shane Agena, Gerardo Cerpa, Alexis Chavez, Faris Griffin, Brian Herrin, Bryan Maldonaldo,
Ramses Montes, Adam Rigney, Travis Tran - Team R.E.S.S.T. (Remote Earth Sea Systems Technology) Video

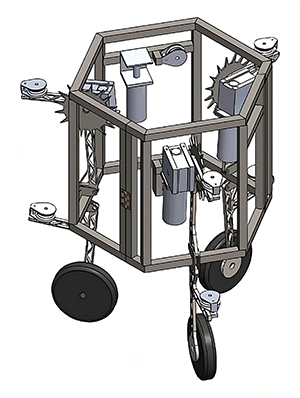
RASC-AL is a national NASA competition to develop a solution for exploring the harsh craters of the lunar south pole for a full year in search of frozen ice. The RASC-GULLS have developed a concept for a self-sustaining rover that is able to perform power-
intensive prospecting tasks with the support of a power-beaming satellite overhead, tens of kilometers away, as well as a physical rover-tracker model to demonstrate this concept. The concept will be able to gather new and conclusive evidence about the moon’s subsurface.
- Team Members: Melmar Almodiel, Samson Ande, Jay Diorio, Adeline Guizar, Dominic Malanga, EJ Milan,
Steven Navarro, Lorans Taqian, Zaid Yasin - Team RASC-GULLS Video
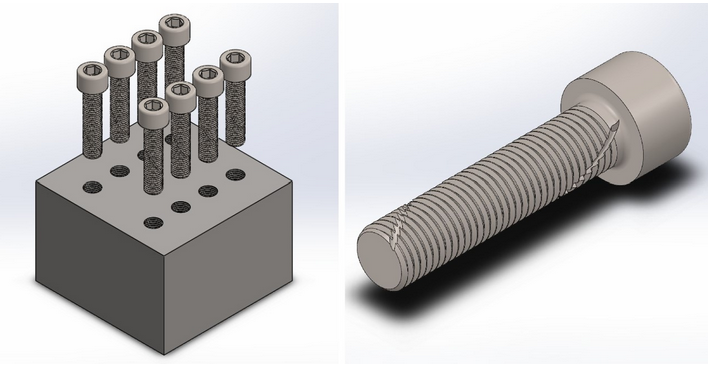
ASML develops Extreme UltraViolet (EUV) lithography light sources using Laser Produced Plasma technology. EUV light is generated by vaporizing small Tin droplets with a Co2 laser, in which the light gets reflected off a large multilayer mirror into the scanner. Team ASML- Optimized Venting has been tasked with delivering an optimized validated design solution to achieve optimal pump down and outgassing parameters for a venting path used in bolted hole sizes: 4mm, 6mm, and 8mm.
- Team Members: Oliver Blasband, Sofia Escobedo Solis, Cassandra Morris, Elijah Sowunmi
- Team ASML- Optimized Venting Video
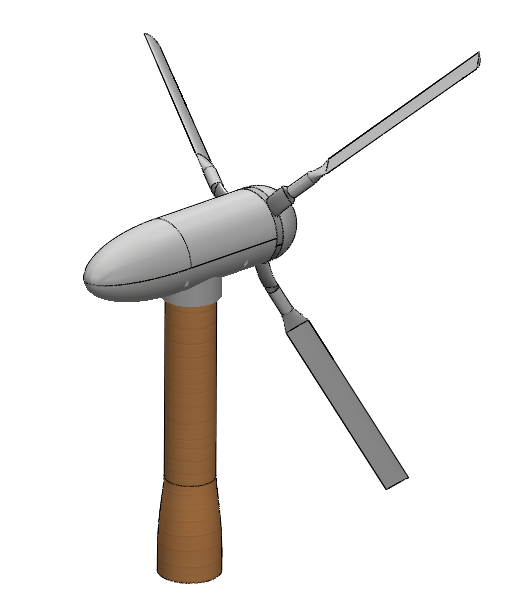
The objective of this project is to design a nature-inspired wind turbine to improve energy capture efficiency and durability. Most turbines turn in wind, and when wind speeds exceed 50 mph, the wind turbine automatically shuts off for safety. To address this, the team designed a horizontal axis wind turbine inspired by the behavior of palm fronds. The blades are mounted to the turbine on bases made of a flexible material that bends inward with increasing wind speeds, improving durability
and maintaining functionality.
- Team Members: Wences Banting, Robert Johnson, Bradley Rittmann, Arman Sarkoob
- Team Exeggutor Video
The Palm Platform is designed to replace human climbers and make trimming safer, faster and cheaper. The Vertical Transport Elevator is the movement and positioning component of a device to trim palms robotically. The elevator will carry a payload to trim palm fronds in the future. Team LV8 has designed, fabricated, and tested a system to adapt to the tree’s diameter while maneuvering on the palm tree. The operator will be capable of controlling the system remotely from a safe distance on the ground.
- Team Members: Matthew Custodio, Carl Michael Garcia, Ritish Gupta, Lizbeth Rodriguez
- Team LV8 Video
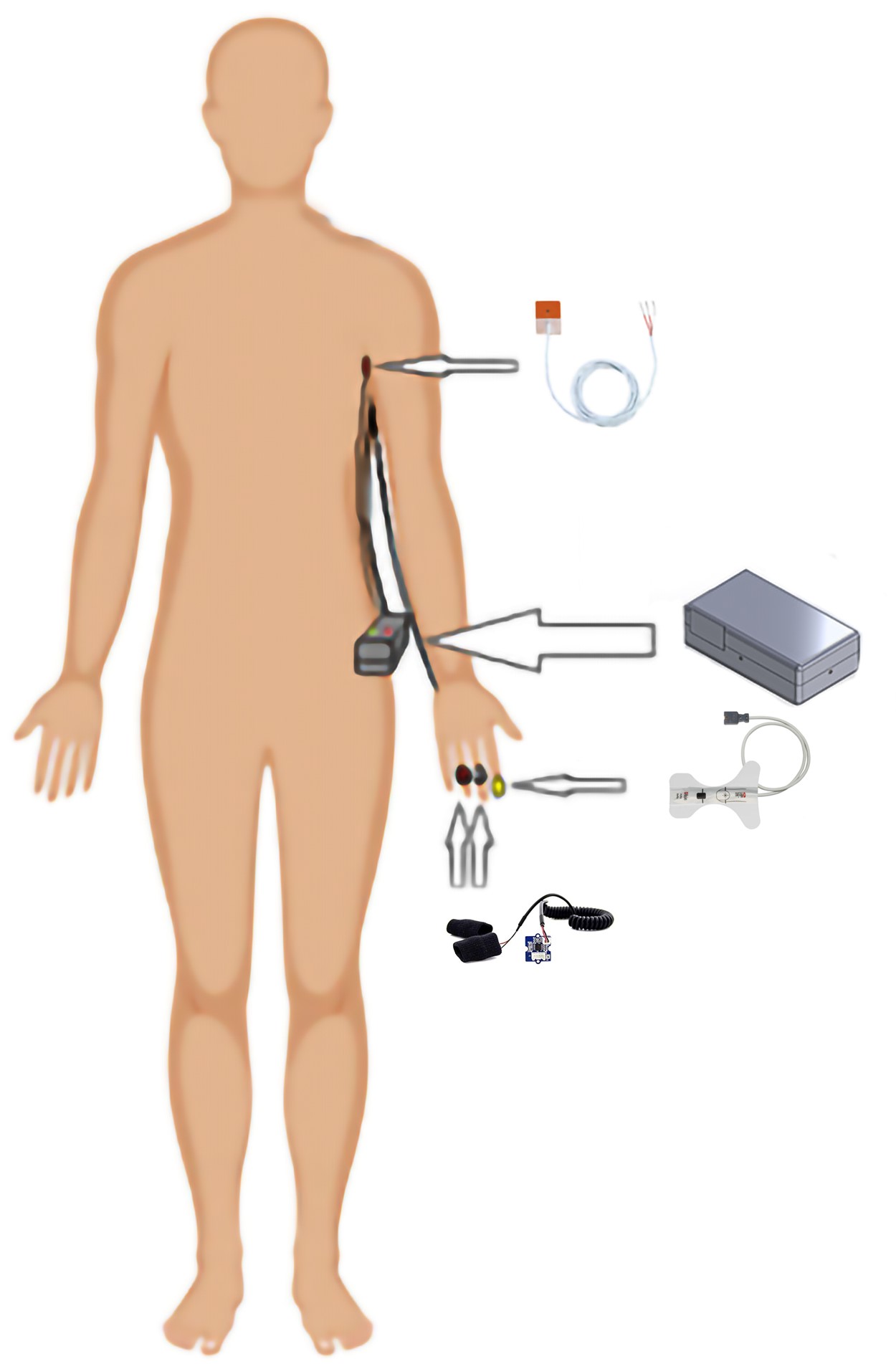
Sponsored by the Systems Engineering Research Center and in collaboration with Masimo, this project aims to create a wearable device for health monitoring of military personnel during training or operations. Utilizing non-invasive sensors to measure vital signs like pulse oximetry, body temperature, and galvanic skin response for
hydration, the device will use machine learning to detect signs of physical distress early. Its design focuses on ensuring the safety and well-being of soldiers by providing real-time health data for immediate response.
- Team Members: Javier Cortes, Marshall Eucker, Mohammad Farah, Joshua Garcia, Ramez Ghattas, Ali Hashim, Joseph Hotto, Davin Kelly, Nicholaus Smith
- Team Vital Metrix Video
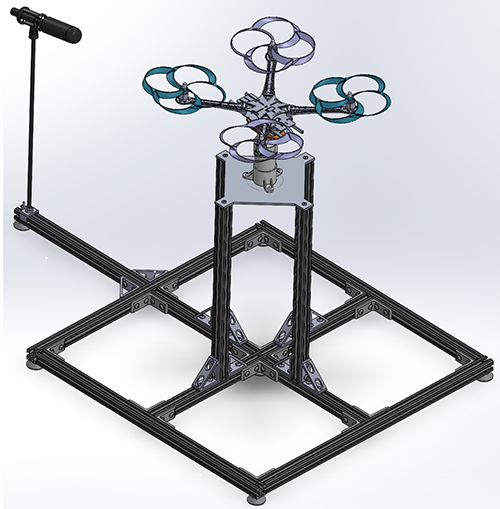
This project introduces a test rig that will be used for evaluating the noise generation for various propulsion systems and models. The test rig incorporates advanced sound output sensors, joint mechanisms, and data acquisition systems to simulate various flight scenarios, allowing engineers to analyze the UAV’s acoustic signature response. Innovative toroidal propellers are used while optimizing shape and geometry to reduce the noise signature of the propulsion system and increase stealth technology.
- Team Members: Alejandro Ballesteros, Juan Flores, Muhammed Jaafar, Kylie Kimura, Zachary Lester,
Khaled Mohieddin, Lia Selena Baluran, Ethan Tift, Ethan Van Buren - Team Stealth Propulsion Systems Video
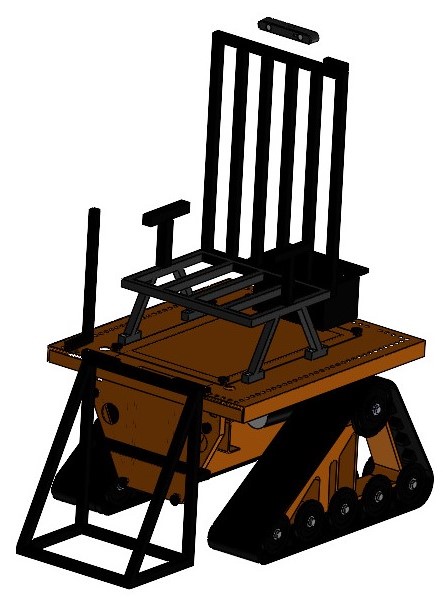
Team ShoreMobility was challenged with a project by Quality of Life Plus, a national organization dedicated to assisting disabled veterans, and AmpSurf, a non-profit that provides adaptive surf therapy to those with disabilities. The project aims to design a self-propelling beach wheelchair, controllable by a joystick. This chair will allow adaptive surfers to navigate through the beach without assistance, which will allow them more independence. It is also designed to easily withstand wet and sandy terrains.
- Team Members: Xavier Arambula, Nicholas Constantino, America Hernandez-Guillen, Idil Nunow
- Team ShoreMobility Video
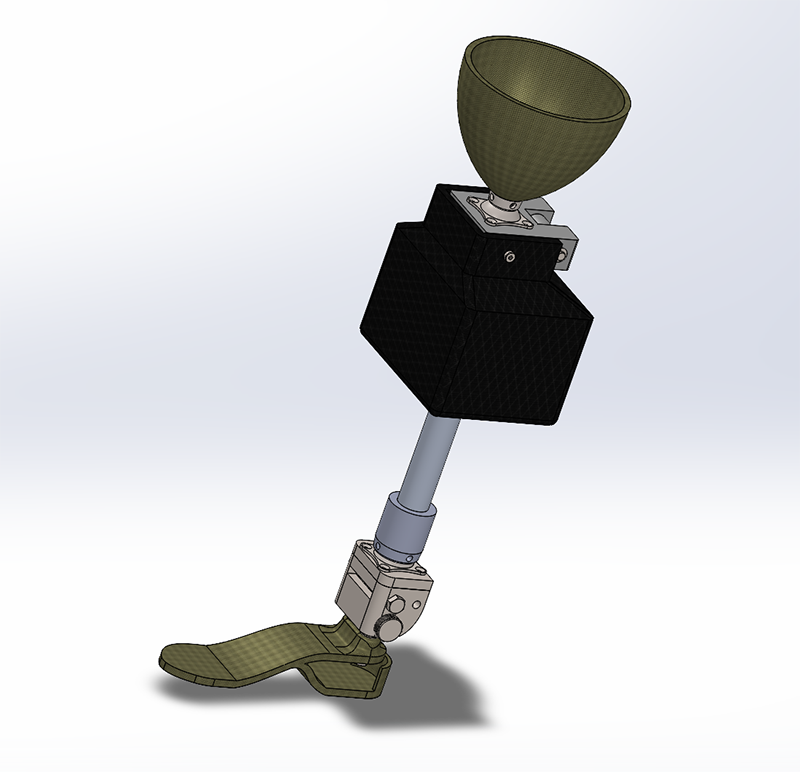
The team has been tasked with the creation of a waterproof prosthetic leg for an individual who underwent a transfemoral amputation. The person has a specific preference for a leg that is buoyant, waterproof, and suitable for aquatic activities like snorkeling and scuba diving. Drawing upon our expertise from San Diego State University, the team has effectively designed and developed a leg that fulfills these requirements through innovative design approaches.
- Team Members: Hadia Bayat, Calvin Fletcher, Brenna Gallagher, Shaun Seko
- Team W.A.L.T.Z. (Water Activity Leg with Tenacious Zeal) Video
The project, which is sponsored by Dr. Asfaw Beyene from the Mechanical Engineering Department, is the development of a sunlight-reflective mirror to make solar energy capture less dependent on angles and space availability. The team is to design, manufacture, and test the system to determine the effect of concentrated sunlight on the stationary PV panel as well as compare the performance and cost of
the system with the reflective mirror versus the GPS-driven system.
- Team Members: Jesus Flores, Nicholas Gabrielson, Milos Skrbic, Alyssandra Steier
- Team Light Track Technology Video
In collaboration with Ascential Technologies, our team has developed a device to measure biomarkers like Europium (III) from samples in a standard 384-well microplate. Central to our design is an optical module focusing UV light onto samples and capturing their red fluorescence emissions. Our device serves as a platform to accelerate medical research and development; biomarker measurement is crucial in cell biology assays, and our device proves as a cost-effective yet highly sensitive and precise instrument for this.
- Team Members: Amber Carreno, Madison Darnauer, Jacob Giesing, Jason Gumbayan, Luan Lam, Justin Lee,
Adam Reyes, Cyrus Rouzitalab, Ethan Zaro - Team TRF Innovations Video
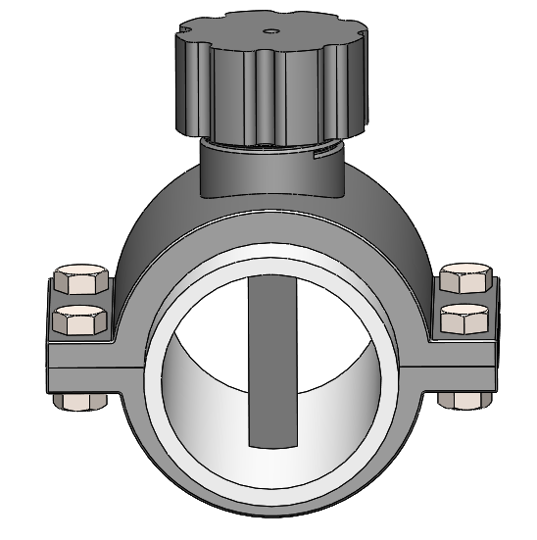
The Vortex Shedding Flowmeter is a single hole prototype design that can withstand up to 40 psi of internal pipe pressure and accurately read across a range of 10-100 gpm flow with an accuracy of 5%. The design utilizes a saddle like clamp system with the bluff body and piezoelectric sensor inserted through a 3/4” hole in a 2” schedule 40 PVC pipe. The system utilizes a PCB board with an integrated LCD screen, microcontroller and RS-485 to control and monitor the flowmeter.
- Team Members: Saqer Alghanem, Nicholas Barrozo, Tobias Booth, John Frisch, Fabian Gutierrez Juarez,
Kevin Kakkary, Nicholas Palmer, Lorena Penney, Naomi Walther - Team FlowTec Video
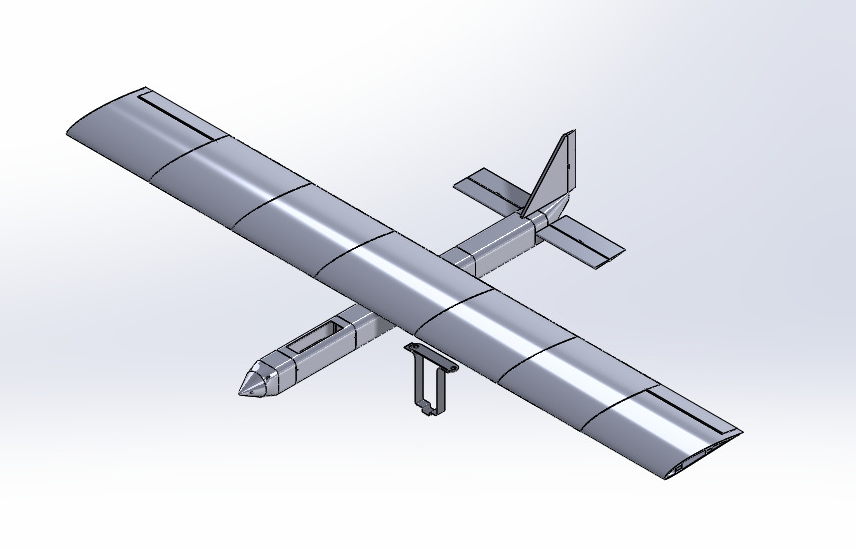
Team Quetzal have designed and manufactured a 3D printed aircraft with the purpose of entering the 3D Printed Aircraft Competition (3DPAC) hosted by Cal State Los Angeles. 3DPAC includes 3 separate competitions: flight, design and simulation. Per competition guidelines all lifting surfaces and aircraft components must be 3D printed except for electronics and select hardware. The aircraft is limited to 8 seconds of powered flight and must fly within a restricted area of 300 x 160 feet and remain under 35 feet.
- Team Members: Alonso Perez, Charles Locke, Edgar Flores, Ralvin Estacio
- Team Quetzal